Man's Best Friend Goes it Alone
Continued...
Overall, the project was
successful. The computer
correctly issued directional
commands 99 percent of
the time.
However, Major's
response to left and right directional
commands was only accurate about 80
percent of the time.
"You have to understand that dogs see
left and right a little differently than we
do," Britt said. "You could give perfect
directions, but you didn't always get the
‘left' or ‘right' that you wanted."
Britt used this research project as the topic
for his doctoral dissertation.
"The most significant thing about
this research is that no one has ever
autonomously controlled a canine in
the manner we demonstrated," he said.
"I guess you could call Major the first
autonomous remote-controlled dog."
In August, Britt graduated with a doctorate
in computer science and software
engineering. His research project will
continue under his former team.
 "We've asked for an additional year on the
funding from the ONR," said Bevly. "There
won't be any more funding through that
particular program project, but we can tack
another year of work onto the resources
we already have and then can search for
further funding from other sources." "We've asked for an additional year on the
funding from the ONR," said Bevly. "There
won't be any more funding through that
particular program project, but we can tack
another year of work onto the resources
we already have and then can search for
further funding from other sources."
Miller and the undergraduate researchers
will take the project to the next level,
working towards a better understanding of
the directional issues Britt encountered.
"Now that we can accurately locate the
position and orientation of the canine, the
question becomes what algorithms will
be effective in getting the canine where
I want it?" Miller said. "Other companies
are showing interest in the work now as
well, and that gives us the opportunity to
expand from our initial goals."
While Britt focused on the use of GPS
and machine learning to autonomously
control Major, Miller plans to add the
use of inertial sensors to the vest and
investigate other control strategies.
GPS gives position, velocity and course
measurements with excellent accuracy,
as long as there are enough satellites in
view and the location of the satellites is
conducive to good estimates.
However, GPS measurements
are taken at relatively
low rates and can be
non-existent if the canine
moves into areas that
have low satellite visibility. So, inertial
sensors and magnetometers can be used
along with GPS to help out. Low grade
inertial sensors, such as gyroscopes and
accelerometers, give measurements at
high rates and continue to do so even
when the canine is indoors and out of
satellite view. But, due to measurement errors, their output
is prone to drift from the true solution.
"GPS can be used to estimate those gyroscope and
accelerometer drift factors when we have a good GPS
lock," said Miller. "When we lose GPS, our inertial sensors
can still give us a decent estimate of position until we regain
GPS."
One thing the team discovered during field testing was
that Major actually started to learn the algorithms and
understand what the computer wanted. Instead of each
direction being a surprise, the dog could learn what the
computer was asking even before it directed. As he learned
what the algorithms were conveying, Major's performance
level increased. Eventually, the team would like to be able
to allow the algorithms to train the dog.
"This activity requires a unique blending of technologies
from mechanical engineering, software engineering and
applied behavioral science of CDRI," Waggoner said. "As
is often the case, this effort also resulted in important
basic science and instrumentation developments that have
potential practical benefits other than those for military or
homeland security, such as in employing instrumented dogs
in assisting persons with various disabilities. Such activities
are consistent with the CDRI's mission of enhancing
working dog technology for the protection of the people
and critical infrastructure of the nation." 
 |
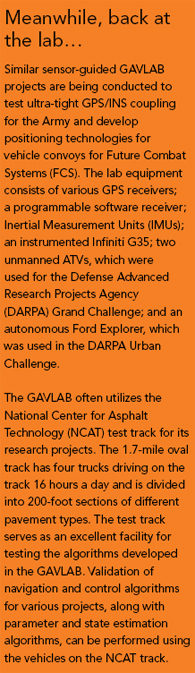
The autonomous canine
system's hardware is surprisingly
small. The smaller box (right)
is a custom-made lithiumpolymer
battery, developed
by undergraduate researcher
Stephan Henning. The larger
black box is the system's
microcomputer - built and
programmed by the team
- while the smaller orange
box contains accelerometers,
gyroscopes and magnetometers. |
<< Page 2
|