Man's Best Friend Goes it Alone
Continued...
Many ideas were
passed back and forth
among the group
- which included
engineering faculty
members George Flowers and Tony
Overfelt - and each was considered
for its utility, practicality and potential
of interest for governmental research
and development funding. When the
idea was presented to use GPS and
autonomous guidance with canine
training, the CDRI was more than
interested; as a program that had
started with bomb detection, faculty
and staff understood the need for a
method of handling detection canines
remotely.
 Bevly had been invited to sit in on the
discussion and decided to use those
topics to finalize his ONR proposal.
He amended his plan and was
awarded funding based on an idea
to research the use of dogs for
security assistance without the
immediate presence of a handler.
The project would use GPS and a
microcontroller to automatically
guide trained dogs to specific
locations. Bevly had been invited to sit in on the
discussion and decided to use those
topics to finalize his ONR proposal.
He amended his plan and was
awarded funding based on an idea
to research the use of dogs for
security assistance without the
immediate presence of a handler.
The project would use GPS and a
microcontroller to automatically
guide trained dogs to specific
locations.
"The technology was much like
that used with unmanned
ground vehicles, but
the modeling of the
system and the design
of a unique control
algorithm for a dog would be the focus
of the research," said Bevly. "This project
was similar to others our lab had worked
on, but now our focus would be a canine
instead of a vehicle.
"
With funding in hand, Bevly immediately
began looking for graduate students who
could assist with the project. Because
the plan was to actually build a pack for
the dog to wear, as well as develop a
software program, he began the hunt for
an electrical and computer engineering
graduate student who would be up to the
task. However, it was a computer science
and software engineering faculty member
whose research caught his eye, leading him
to then doctoral student Win Britt.
"I went to faculty member Gerry Dozier
to see about using neural
networks to guide the
dogs," Bevly said. "Then Win came on board with a plan to
use an artificial intelligence method."
\
As a budding computer scientist, Britt
jumped right to artificial intelligence as a
means for guiding the dog.
"I just began by asking the question, ‘How
can we model and control a dog?'" said
Britt.
The plan was simple. Or at
least simple to explain.
The team would develop a suite of models
and algorithms that could autonomously
direct a canine to a specified point, using
GPS coordinates. The canine, would wear a
device that would utilize the programmed
directions to lead him to that position.
Britt and his team spent the better part of
three years making it all come together.
He focused specifically on the modeling
and software systems that would
autonomously control the canine and
worked side-by-side with mechanical
engineering graduate student Jeffrey
Miller, who was responsible for the GPSrelated
aspects of the program.
 "To be able to automate the remote
control of a canine, we needed to attach
sensors to the canine that would give the
computer knowledge about the canine's
position and heading in reference to given
way points," said Miller. "My job was to
incorporate GPS with inertial sensors to
give that information."
The team also included two undergraduate
research assistants, computer science's
William Lyles and electrical engineering's
Stephan Henning. "To be able to automate the remote
control of a canine, we needed to attach
sensors to the canine that would give the
computer knowledge about the canine's
position and heading in reference to given
way points," said Miller. "My job was to
incorporate GPS with inertial sensors to
give that information."
The team also included two undergraduate
research assistants, computer science's
William Lyles and electrical engineering's
Stephan Henning.
"What became really interesting was how
to build the controller," Britt said. "It was
fascinating what we could learn from those
little sensors and how we could use the
data that they retrieved."
They worked countless hours putting
together a canine vest that would receive
the signals to direct the dog. Through
the use of tones and vibrations, the team
discovered a system that could direct the
dog to go left or right, forward, come to a
stop or return to its base and trainer.
But they couldn't just place
the outfit on a dog without
trial.
"Oh, yes," Britt said with a chuckle, "we
definitely spent some time testing the
equipment on ourselves first."
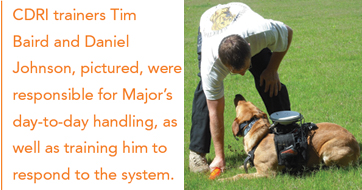
After numerous rounds of lab testing, the
team decided it was time to take their
equipment out into the field. For this stage
of testing, the team chose a 4-year-old
yellow lab named Major from the Canine
Detection Training Center, part of the CRDI.
Major was already well trained in "blind
retrieves," a method often used by hunters
to retrieve game fowl, such as duck,
pheasant or quail. In a blind retrieve, a
hunter uses sounds or hand signals to
direct the canine to the desired point to
retrieve its quarry. This way, the dog isn't
confused if he loses his line of sight. This
training made Major a perfect choice for
the project.
"Major already knew the mechanics that
went along with being directed to a specific
goal," said Britt. "That made our job easier
in that all we had to do was change the
source of the stimuli he was used to."
Once he adjusted to the sensor vest, Major
was ready to test his skills at finding his
hidden "dummies."
Britt arranged for two different types of The first, which he calls the "fair test,"
involves a situation where a person with
remote access can accurately provide the
same directions as the control computer.
The second, the "unfair test," involves
placing the dog in a setting where the computer must give all the directions, such
as a situation in which a building or similar
distraction blocks the trainer's line of sight.
For the most part, the field
trials went smoothly.
"Occasionally, we'd forget that the dog
didn't really have a sense that he was
carrying one-of-a-kind equipment in a vest
on his back," Britt said. "So, he'd run too
close to the side of a building and clip the
electronics pack, or he'd slide through a
mud puddle and soak the equipment."
<< Page 1 Page 3 >>
|